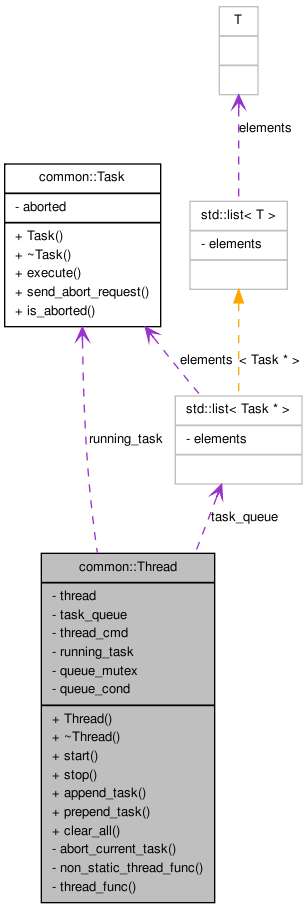
common::Thread Class Reference
#include <thread.h>
Public Member Functions | |
| Thread () | |
| Constructors and destructors. | |
| ~Thread () | |
| bool | start () |
| Run thread. | |
| void | stop (bool cancel_all_tasks=true) |
| Stop current thread. | |
| bool | append_task (Task *new_task) |
| Append the task to the end of the task queue. | |
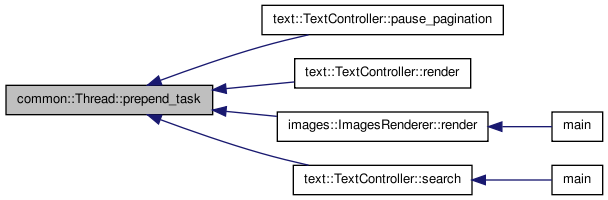
| bool | prepend_task (Task *new_task, bool abort_current) |
| Insert the task to the head of the task queue. | |
| void | clear_all () |
| Remove all tasks in the task queue. | |
Detailed Description
Definition at line 103 of file thread.h.
Constructor & Destructor Documentation
| common::Thread::Thread | ( | ) |
Constructors and destructors.
Definition at line 44 of file thread.cpp.
00047 : thread(NULL), 00048 thread_cmd(CMD_NONE), 00049 running_task(0) 00050 { 00051 queue_mutex = g_mutex_new();
| common::Thread::~Thread | ( | ) |
Definition at line 53 of file thread.cpp.
Member Function Documentation
| bool common::Thread::append_task | ( | Task * | new_task | ) |
Append the task to the end of the task queue.
Definition at line 164 of file thread.cpp.
Referenced by text::TextController::paginate().
00167 { 00168 if (thread_cmd == CMD_NONE) 00169 { 00170 // Append task to the end of the task queue. 00171 g_mutex_lock(queue_mutex); 00172 task_queue.push_back(new_task); 00173 g_mutex_unlock(queue_mutex); 00174 00175 // Tells the worker thread that a new task is available. 00176 g_cond_signal(queue_cond); 00177 return true; 00178 } 00179 else 00180 { 00181 delete new_task; 00182 return false;

| void common::Thread::clear_all | ( | ) |
Remove all tasks in the task queue.
Definition at line 109 of file thread.cpp.
Referenced by images::ImagesRenderer::render().
00112 { 00113 g_mutex_lock(queue_mutex); 00114 00115 std::list<Task*>::iterator it = task_queue.begin(); 00116 while (it != task_queue.end()) 00117 { 00118 delete *it; 00119 it = task_queue.erase(it); 00120 } 00121

| bool common::Thread::prepend_task | ( | Task * | new_task, | |
| bool | abort_current | |||
| ) |
Insert the task to the head of the task queue.
- Parameters:
-
abort_current This flag tells the thread that after inserting the new task to the head of the queue, abort current running task immediately. We should NOT give user a capability to abort the running task because the aborted task may generate a new task, and put it to the end of the queue, which may be executed by worker thread immediately. That is NOT we want.
Definition at line 184 of file thread.cpp.
Referenced by text::TextController::pause_pagination(), text::TextController::render(), images::ImagesRenderer::render(), and text::TextController::search().
00187 { 00188 if (thread_cmd == CMD_NONE) 00189 { 00190 // Insert task to the beginning of the task queue. 00191 g_mutex_lock(queue_mutex); 00192 task_queue.push_front(new_task); 00193 00194 if (abort_current) 00195 { 00196 abort_current_task(); 00197 } 00198 00199 g_mutex_unlock(queue_mutex); 00200 00201 // Tells the worker thread that a new task is available. 00202 g_cond_signal(queue_cond); 00203 00204 return true; 00205 } 00206 else 00207 { 00208 delete new_task; 00209 return false;
| bool common::Thread::start | ( | ) |
Run thread.
Definition at line 123 of file thread.cpp.
Referenced by images::ImagesRenderer::ImagesRenderer(), and text::TextController::start().
00126 { 00127 if (thread != NULL) 00128 { 00129 // The thread has been started. 00130 return false; 00131 } 00132 00133 thread = g_thread_create(thread_func, this, TRUE, NULL);

| void common::Thread::stop | ( | bool | cancel_all_tasks = true |
) |
Stop current thread.
Definition at line 135 of file thread.cpp.
Referenced by text::TextController::stop(), images::ImagesRenderer::stop(), and images::ImagesRenderer::~ImagesRenderer().
00138 { 00139 if (thread == NULL) 00140 { 00141 return; 00142 } 00143 00144 thread_cmd = cancel_all_tasks ? CMD_TERMINATE : CMD_STOP; 00145 00146 if (running_task != 0) 00147 { 00148 if (cancel_all_tasks) 00149 { 00150 running_task->send_abort_request(); 00151 } 00152 } 00153 else 00154 { 00155 // Woker thread is waiting for a task, wake it up. 00156 g_cond_signal(queue_cond); 00157 } 00158 00159 // Wait for worker thread to die. 00160 g_thread_join(thread); 00161 00162 // Set the thread to be NULL

The documentation for this class was generated from the following files: