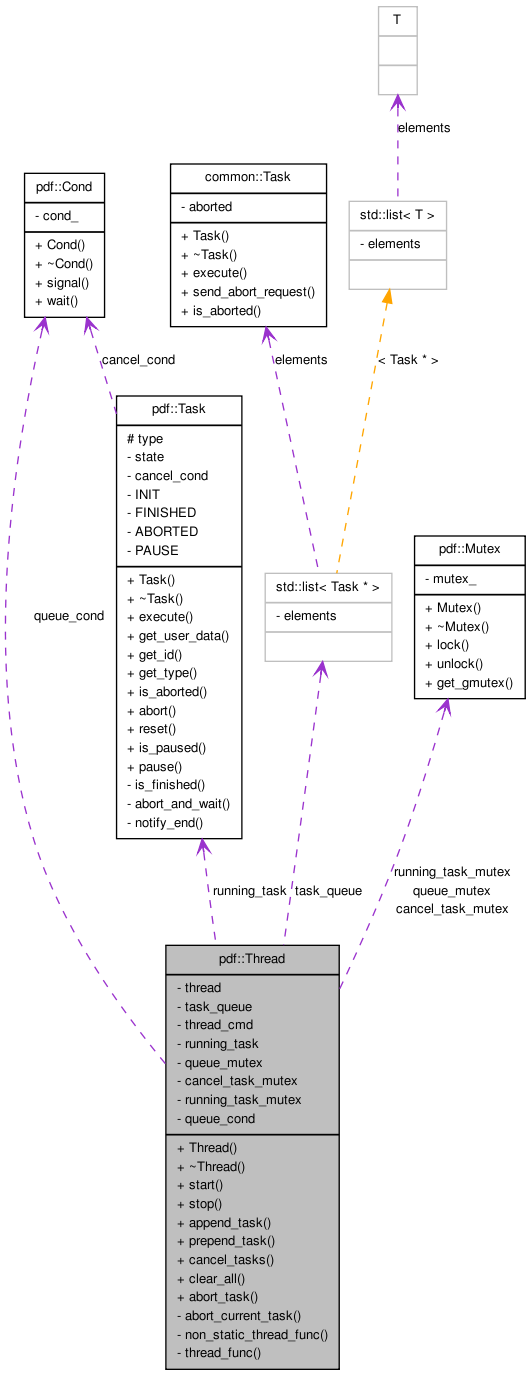
pdf::Thread Class Reference
#include <pdf_thread.h>
Public Member Functions | |
| Thread () | |
| Constructors and destructors. | |
| ~Thread () | |
| bool | start () |
| Run thread. | |
| void | stop (bool cancel_all_tasks=true) |
| Stop current thread. | |
| bool | append_task (Task *new_task) |
| Append the task to the end of the task queue. | |
| bool | prepend_task (Task *new_task, bool abort_current) |
| Insert the task to the head of the task queue. | |
| void | cancel_tasks (void *user_data=0) |
| Cancel all of the tasks including current one. | |
| void | clear_all (void *user_data=0, TaskType t=TASK_INVALID) |
| Remove all tasks in the task queue. | |
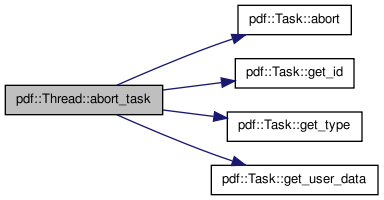
| bool | abort_task (void *user_data, TaskType t, unsigned int id) |
| Abort or remove a given task. | |
Detailed Description
Definition at line 42 of file pdf_thread.h.
Constructor & Destructor Documentation
| pdf::Thread::Thread | ( | ) |
Constructors and destructors.
Definition at line 41 of file pdf_thread.cpp.
00042 : thread(NULL) 00043 , thread_cmd(CMD_NONE) 00044 , running_task(0) 00045 { 00046 }
| pdf::Thread::~Thread | ( | ) |
Definition at line 48 of file pdf_thread.cpp.
Member Function Documentation
| bool pdf::Thread::abort_task | ( | void * | user_data, | |
| TaskType | t, | |||
| unsigned int | id | |||
| ) |
Abort or remove a given task.
Definition at line 293 of file pdf_thread.cpp.
References pdf::Task::abort(), pdf::Task::get_id(), pdf::Task::get_type(), and pdf::Task::get_user_data().
Referenced by pdf::PDFController::abort_search().
00294 { 00295 { 00296 ScopeMutex r(&running_task_mutex); 00297 if (running_task != 0 && 00298 running_task->get_type() == t && 00299 running_task->get_user_data() == user_data && 00300 running_task->get_id() == id) 00301 { 00302 // if running task is the one, abort it 00303 running_task->abort(); 00304 return true; 00305 } 00306 } 00307 00308 // search the task in queue 00309 ScopeMutex m(&queue_mutex); 00310 TaskQueueIter idx = task_queue.begin(); 00311 while (idx != task_queue.end()) 00312 { 00313 if ((*idx)->get_type() == t && 00314 (*idx)->get_user_data() == user_data && 00315 (*idx)->get_id() == id) 00316 { 00317 delete *idx; 00318 task_queue.erase(idx); 00319 return true; 00320 } 00321 idx++; 00322 } 00323 00324 return false; 00325 }

| bool pdf::Thread::append_task | ( | Task * | new_task | ) |
Append the task to the end of the task queue.
Definition at line 204 of file pdf_thread.cpp.
References pdf::Cond::signal().
Referenced by pdf::PDFLibrary::thread_add_render_task().
00205 { 00206 if (thread_cmd == CMD_NONE) 00207 { 00208 // Append task to the end of the task queue. 00209 { 00210 ScopeMutex m(&queue_mutex); 00211 task_queue.push_back(new_task); 00212 } 00213 00214 // Tells the worker thread that a new task is available. 00215 queue_cond.signal(); 00216 return true; 00217 } 00218 00219 return false; 00220 }


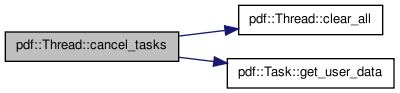
| void pdf::Thread::cancel_tasks | ( | void * | user_data = 0 |
) |
Cancel all of the tasks including current one.
- Parameters:
-
user_data if this value is not null, thread will clear all of the tasks with this value.
Definition at line 107 of file pdf_thread.cpp.
References clear_all(), and pdf::Task::get_user_data().
Referenced by pdf::PDFLibrary::remove_tasks_by_document().
00108 { 00109 clear_all(user_data); 00110 00111 ScopeMutex r(&running_task_mutex); 00112 if (running_task != 0 && 00113 running_task->get_user_data() == user_data) 00114 { 00115 running_task->abort_and_wait(cancel_task_mutex); 00116 } 00117 }

| void pdf::Thread::clear_all | ( | void * | user_data = 0, |
|
| TaskType | t = TASK_INVALID | |||
| ) |
Remove all tasks in the task queue.
Definition at line 119 of file pdf_thread.cpp.
References pdf::TASK_INVALID.
Referenced by cancel_tasks(), stop(), and pdf::PDFLibrary::thread_cancel_render_tasks().
00120 { 00121 ScopeMutex m(&queue_mutex); 00122 00123 TaskQueueIter idx = task_queue.begin(); 00124 while (idx != task_queue.end()) 00125 { 00126 bool is_remove = false; 00127 if (user_data == 0) 00128 { 00129 is_remove = true; 00130 } 00131 else if (user_data == (*idx)->get_user_data()) 00132 { 00133 if (t == TASK_INVALID || (t == (*idx)->type)) 00134 { 00135 is_remove = true; 00136 } 00137 } 00138 00139 if (is_remove) 00140 { 00141 delete *idx; 00142 idx = task_queue.erase(idx); 00143 } 00144 else 00145 { 00146 idx++; 00147 } 00148 } 00149 00150 if (user_data == 0) 00151 { 00152 task_queue.clear(); 00153 } 00154 }

| bool pdf::Thread::prepend_task | ( | Task * | new_task, | |
| bool | abort_current | |||
| ) |
Insert the task to the head of the task queue.
- Parameters:
-
abort_current This flag tells the thread that after inserting the new task to the head of the queue, abort current running task immediately. We should NOT give user a capability to abort the running task because the aborted task may generate a new task, and put it to the end of the queue, which may be executed by worker thread immediately. That is NOT we want.
Definition at line 222 of file pdf_thread.cpp.
References pdf::Cond::signal().
Referenced by pdf::PDFLibrary::thread_add_render_task(), and pdf::PDFLibrary::thread_add_search_task().
00223 { 00224 if (thread_cmd == CMD_NONE) 00225 { 00226 // Insert task to the beginning of the task queue. 00227 ScopeMutex m(&queue_mutex); 00228 task_queue.push_front(new_task); 00229 00230 // Tells the worker thread that a new task is available. 00231 queue_cond.signal(); 00232 00233 if (abort_current) 00234 { 00235 abort_current_task(new_task); 00236 } 00237 00238 return true; 00239 } 00240 00241 return false; 00242 }


| bool pdf::Thread::start | ( | ) |
Run thread.
Definition at line 156 of file pdf_thread.cpp.
00157 { 00158 if (thread != NULL) 00159 { 00160 // The thread has been started. 00161 return false; 00162 } 00163 00164 // Reset the thread cmd. TODO: Replace this variable by a boolean. 00165 thread_cmd = CMD_NONE; 00166 00167 thread = g_thread_create(thread_func, this, TRUE, NULL); 00168 return thread != NULL; 00169 }
| void pdf::Thread::stop | ( | bool | cancel_all_tasks = true |
) |
Stop current thread.
TODO, still a problem here. running task must be associated with document. Can not use cancle all tasks directly.
Definition at line 173 of file pdf_thread.cpp.
References clear_all(), and pdf::Cond::signal().
Referenced by pdf::PDFLibrary::~PDFLibrary().
00174 { 00175 if (thread == NULL) 00176 { 00177 return; 00178 } 00179 00180 thread_cmd = cancel_all_tasks ? CMD_TERMINATE : CMD_STOP; 00181 00182 { 00183 ScopeMutex r(&running_task_mutex); 00184 if (running_task != 0) 00185 { 00186 if (cancel_all_tasks) 00187 { 00188 running_task->abort_and_wait(cancel_task_mutex); 00189 } 00190 } 00191 } 00192 00193 queue_cond.signal(); 00194 00195 // Wait for worker thread to die. 00196 g_thread_join(thread); 00197 00198 clear_all(); 00199 00200 // Set the thread to be NULL 00201 thread = NULL; 00202 }

The documentation for this class was generated from the following files: